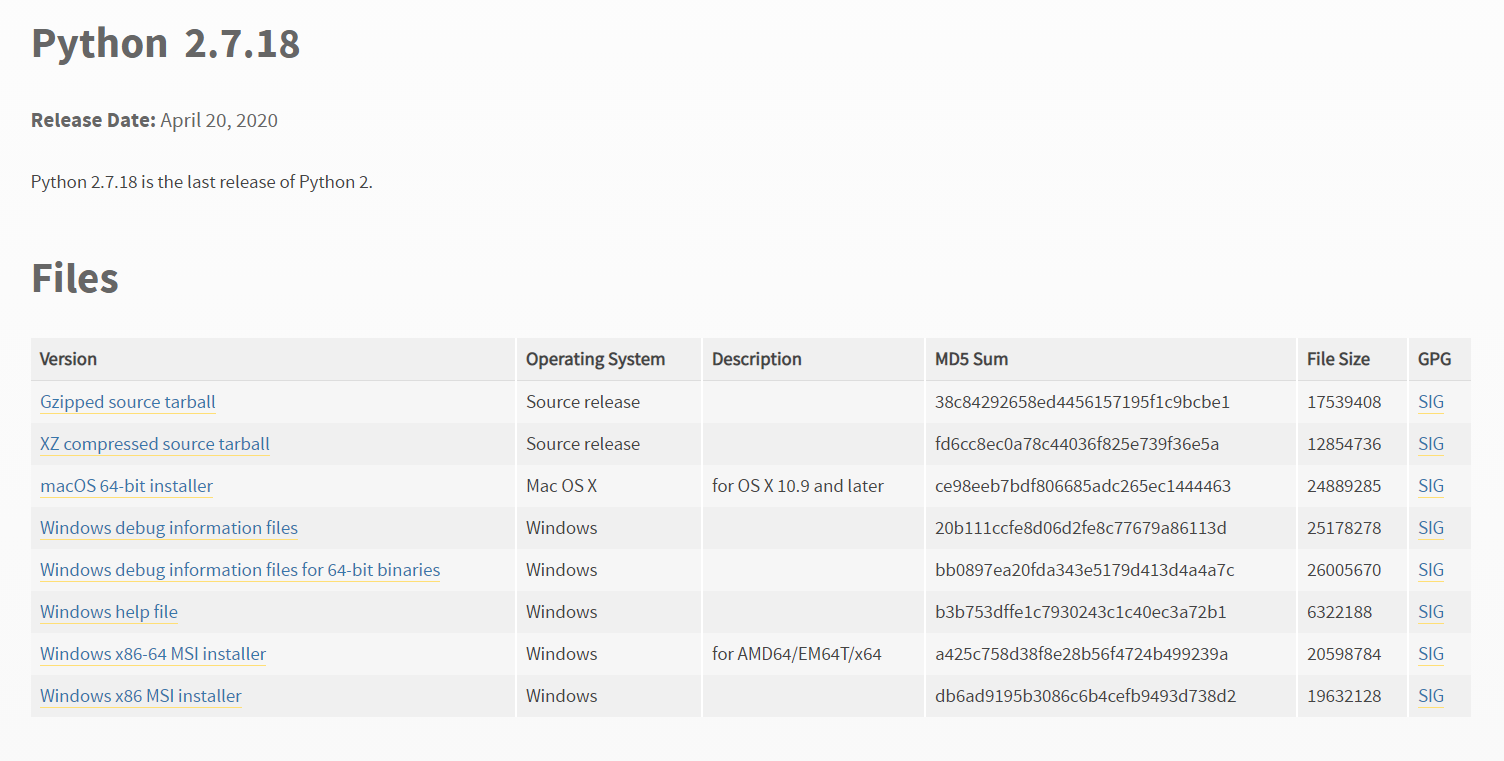
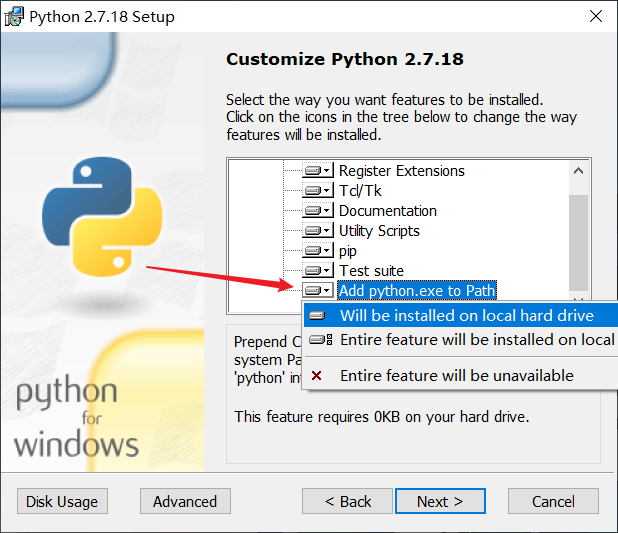
我们实验室所使用的机器人型号是NAO V6,我们使用的环境是Python2.7 32位(64位也行,为了减少麻烦,建议使用32位),尽量避免使用中文目录。
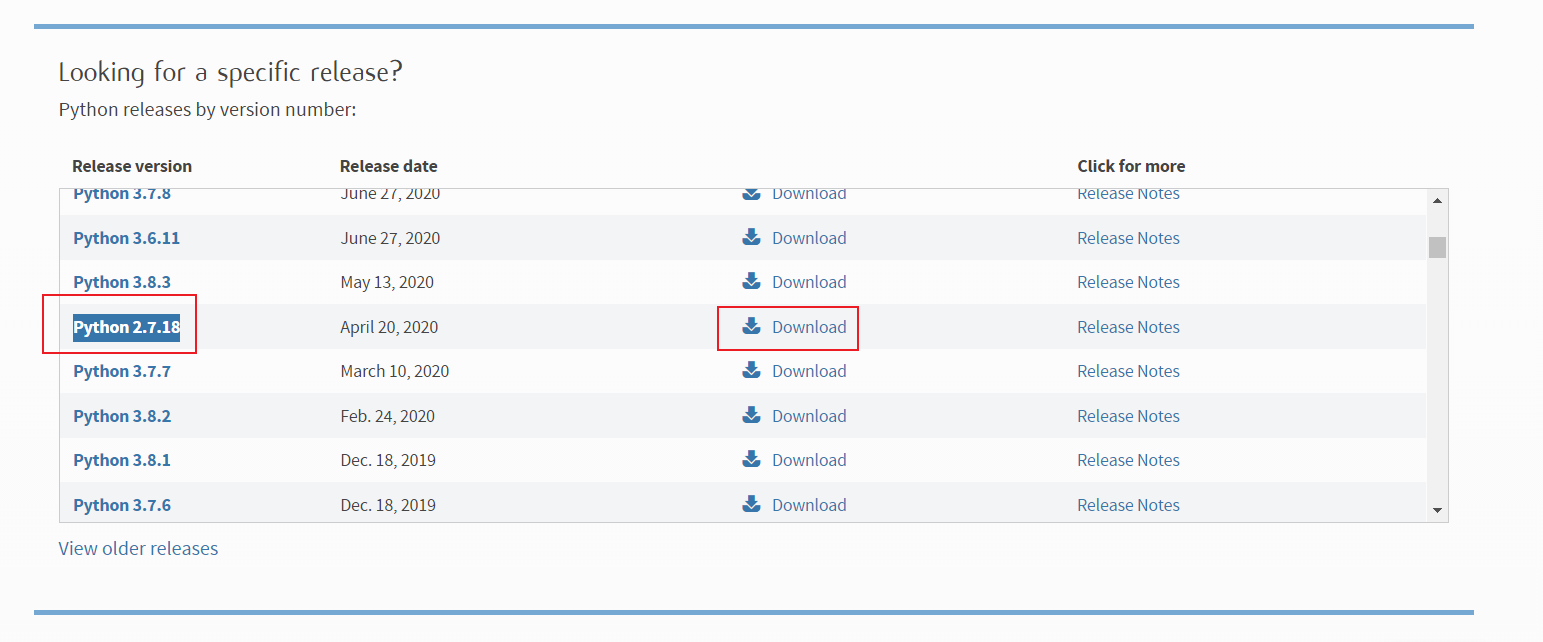
通过此链接 https://www.python.org/downloads/ 打开 Python 的下载页面,找到
Python 2.7.18
,点开。
通过此链接 https://www.jetbrains.com/pycharm/download/ 打开 PyCharm 的下载页面

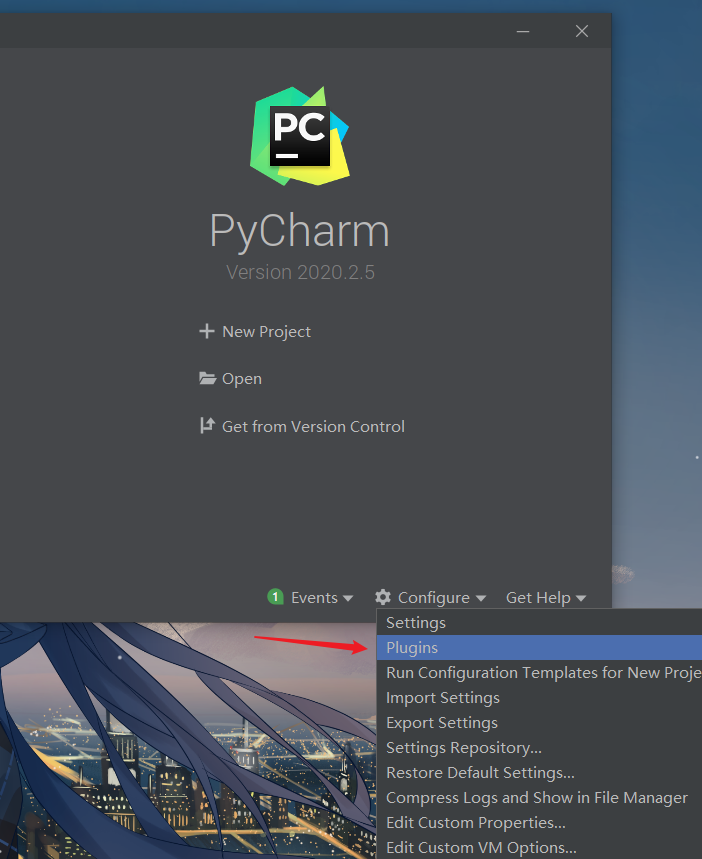
可以安装中文插件来设置中文语言。
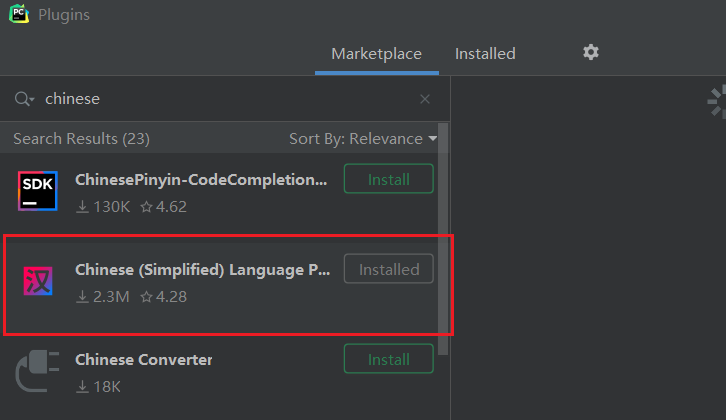
chinese ,下载完成重启IDE即可。
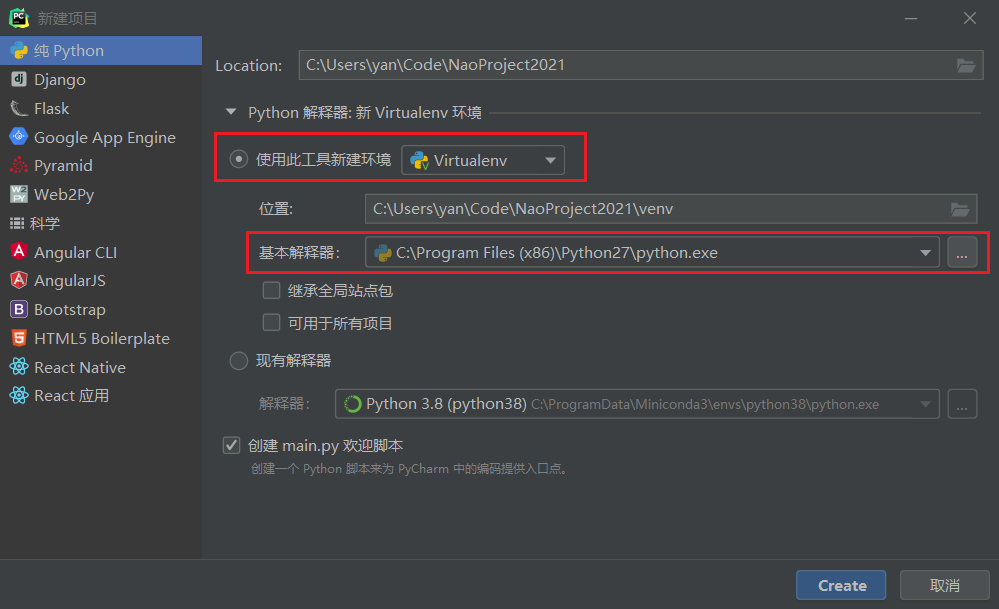
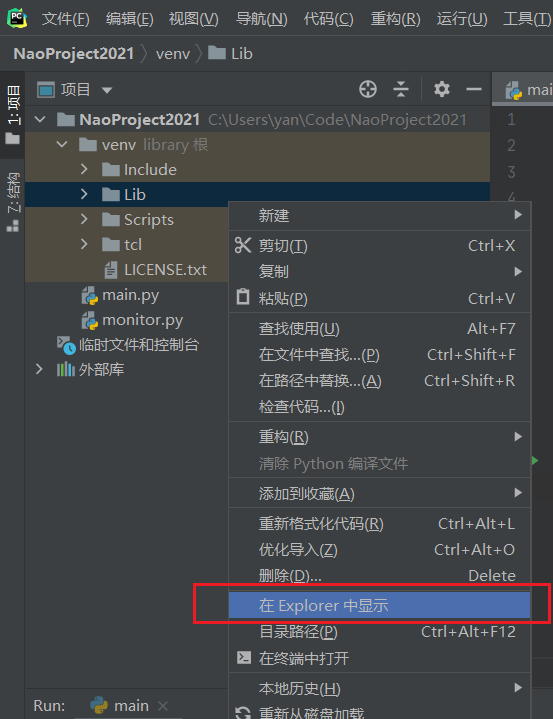
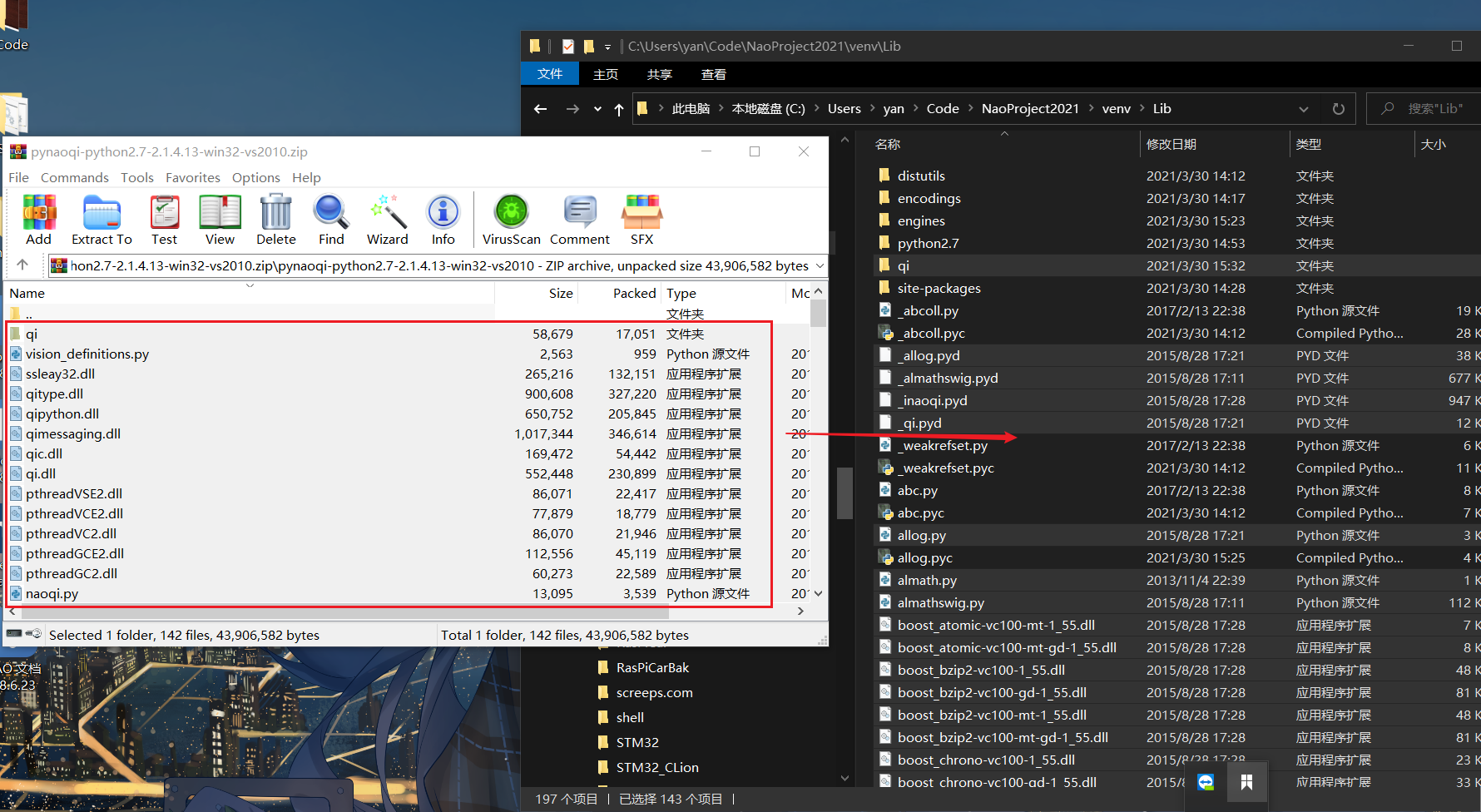
使用 Virtualenv 建立虚拟环境,解释器选 Python2.7 32位。
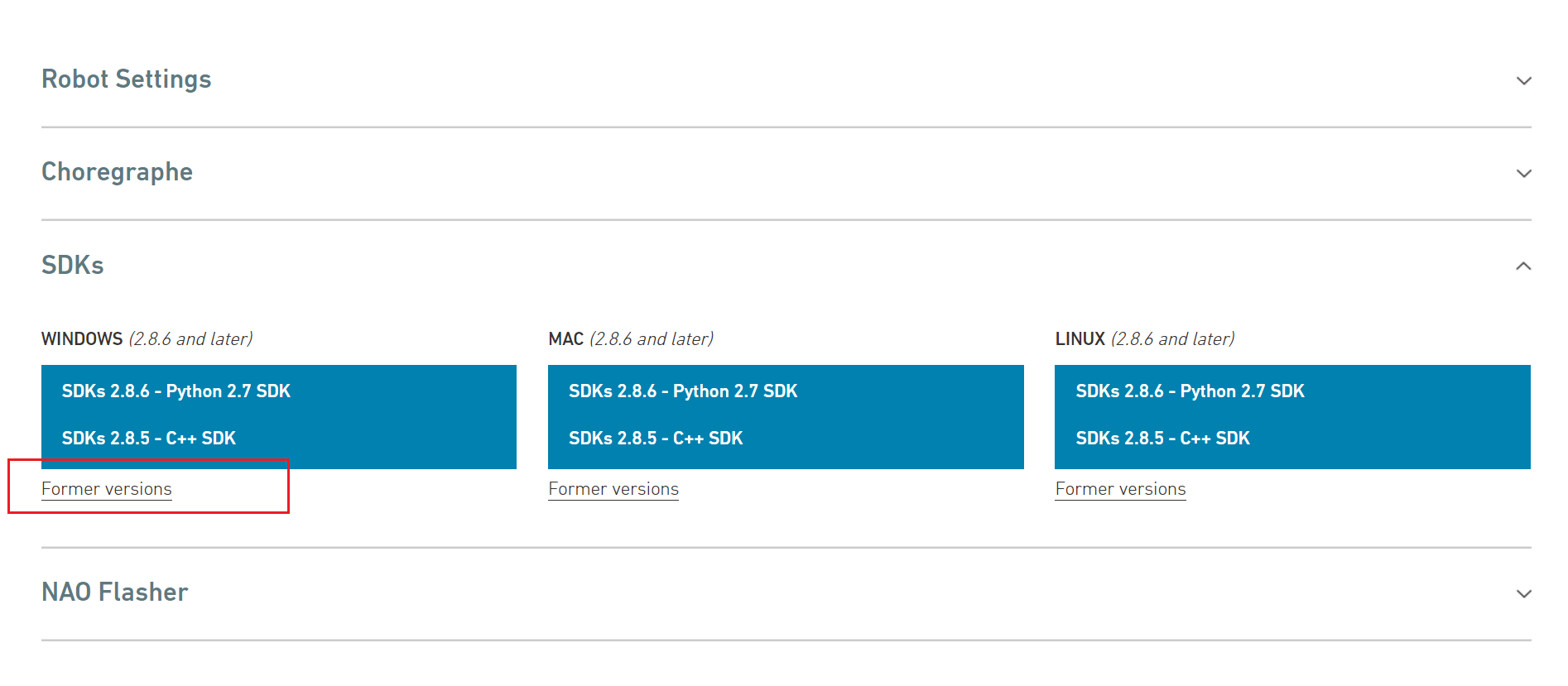
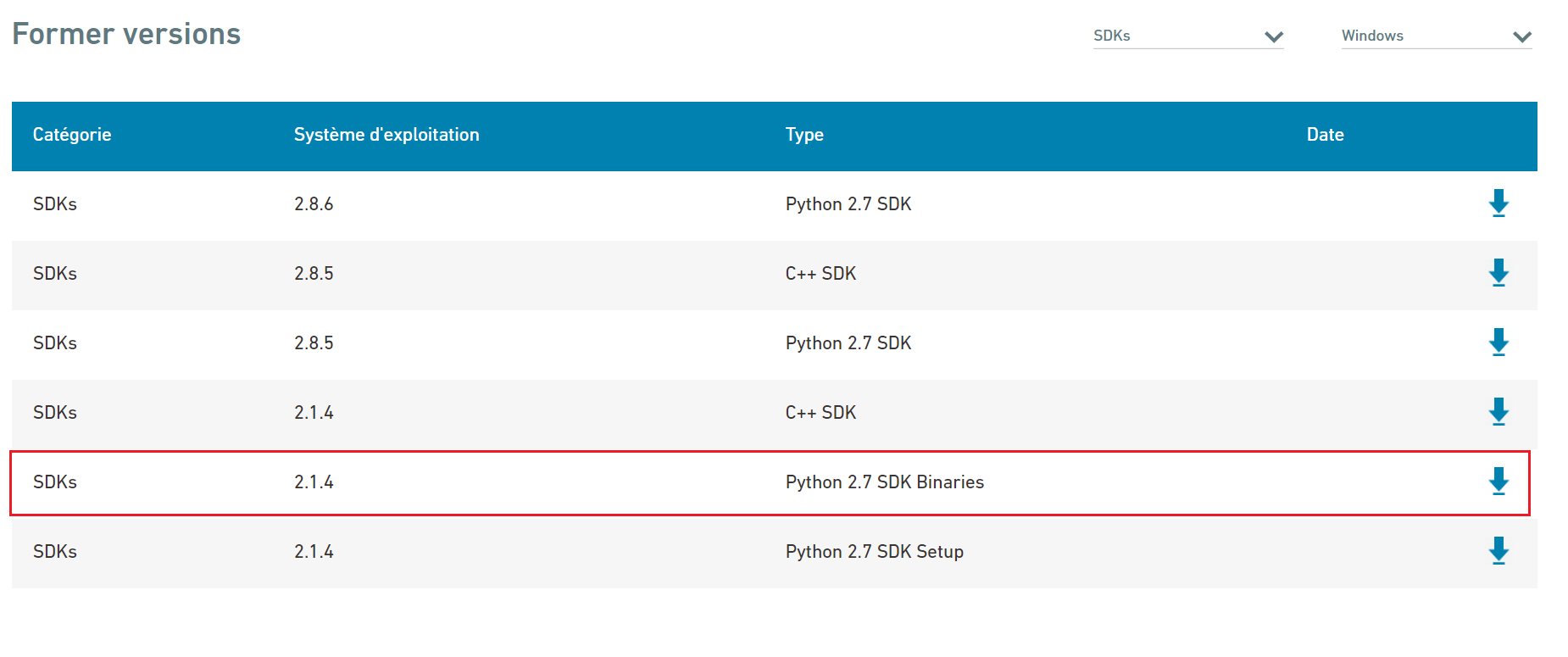
通过此链接 https://www.aldebaran.com/en/support/nao-6/downloads-softwares/former-versions?os=45&category=76) 打开软银的软件下载页面。
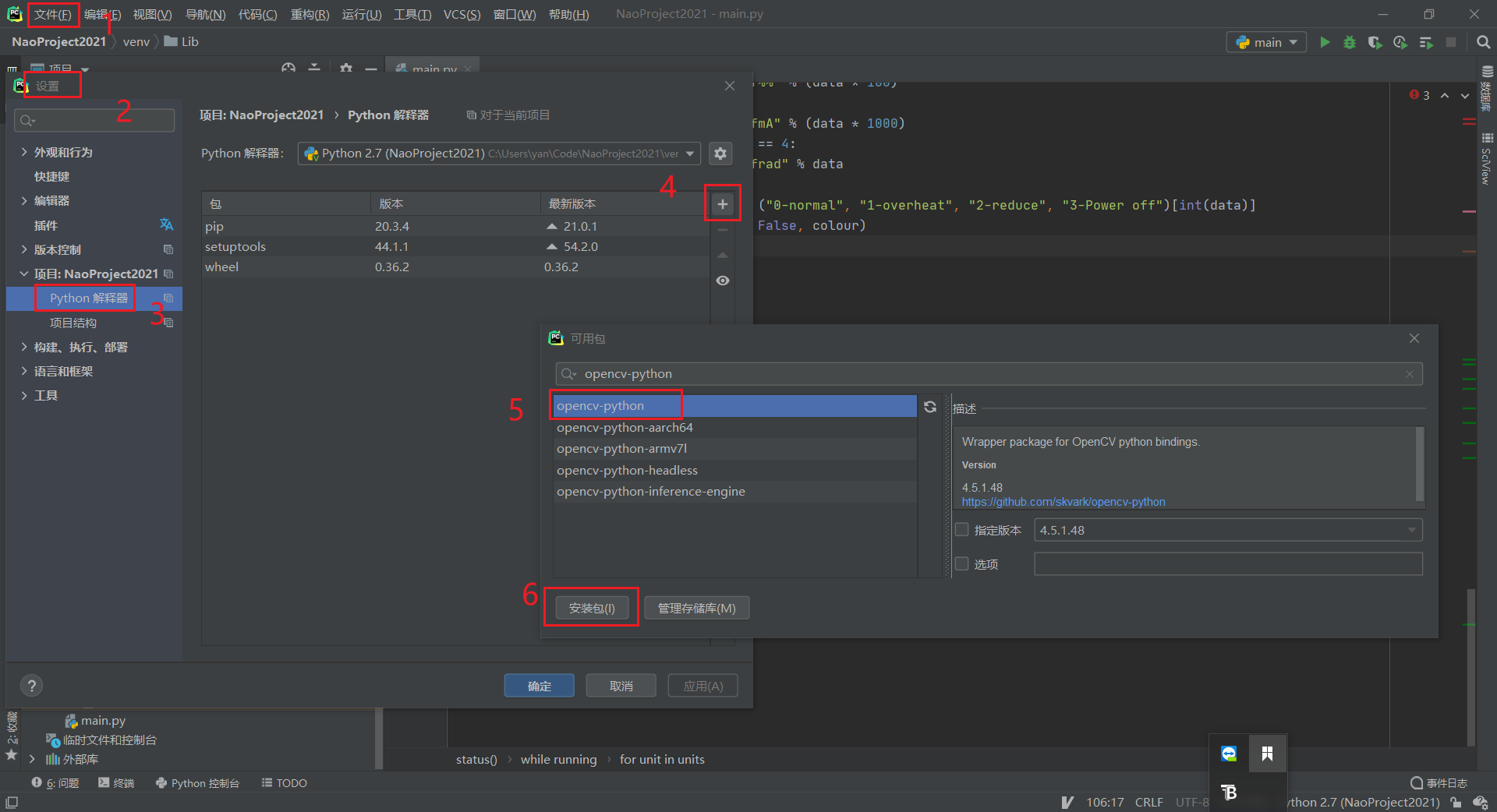
打开设置,点开项目,Python 解释器,添加包,搜索opencv-python 然后安装。高版本 OpenCV 可能会安装失败,建议使用 4.0 版本。
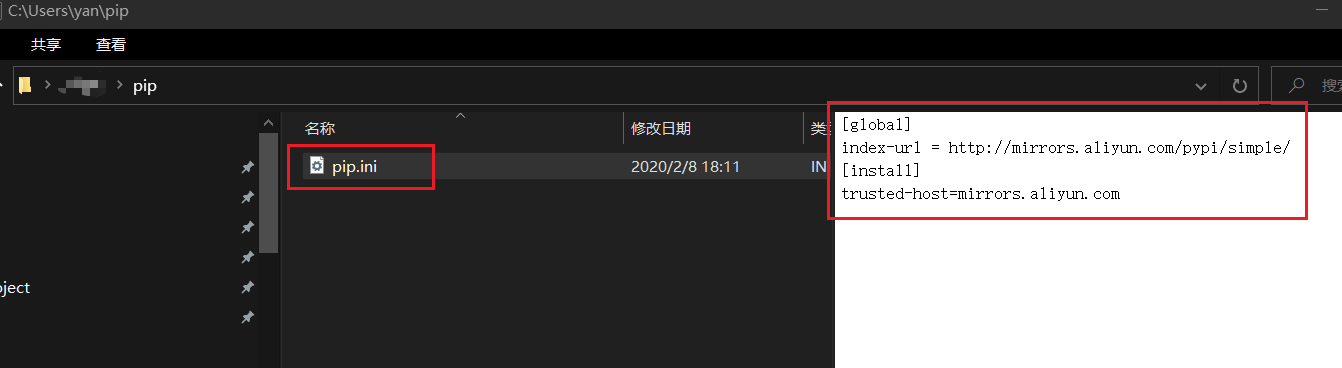
将 pip 源更改为阿里云可以提高安装速度。 在用户文件夹下新建名为 pip 的文件夹,再在 pip 文件夹内新建 pip.ini 文件。写入下面的代码。
[global]
index-url = http://mirrors.aliyun.com/pypi/simple/
[install]
trusted-host=mirrors.aliyun.com
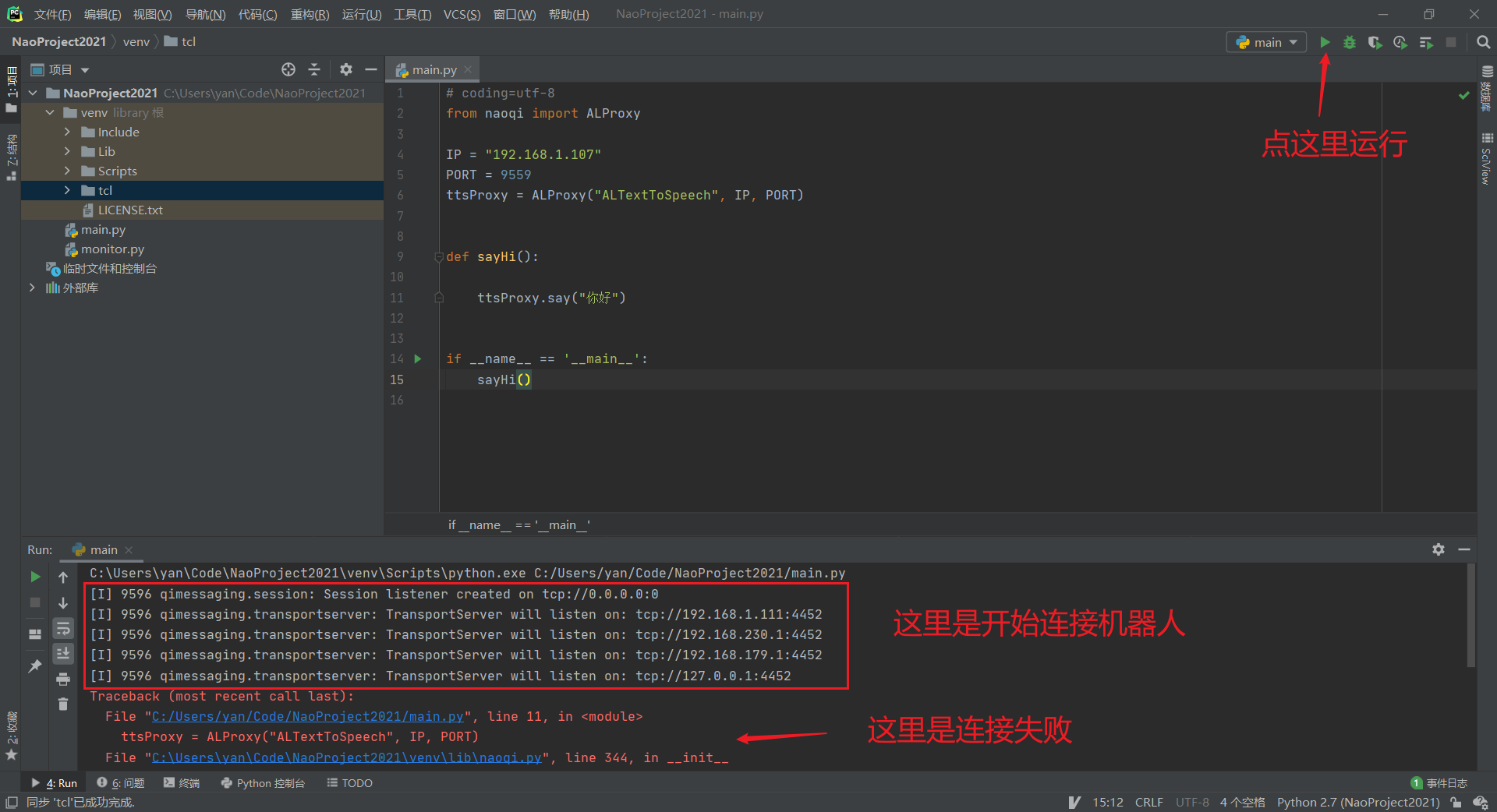
在 main.py 写入以下代码(让机器人说你好)。
# coding=utf-8
from naoqi import ALProxy
IP = "192.168.1.107" # 机器人的IP地址
PORT = 9559 # 机器人的端口号,默认9559
ttsProxy = ALProxy("ALTextToSpeech", IP, PORT)
def sayHi():
ttsProxy.say("你好")
if __name__ == '__main__':
sayHi()