The Official Baseline for UniV: the First Large-Scale Video-Based University Geo-Localization Benchmark
Drone Video ↔ Satellite Image Cross-View Retrieval & Navigation


• Watch full results on Bilibili:
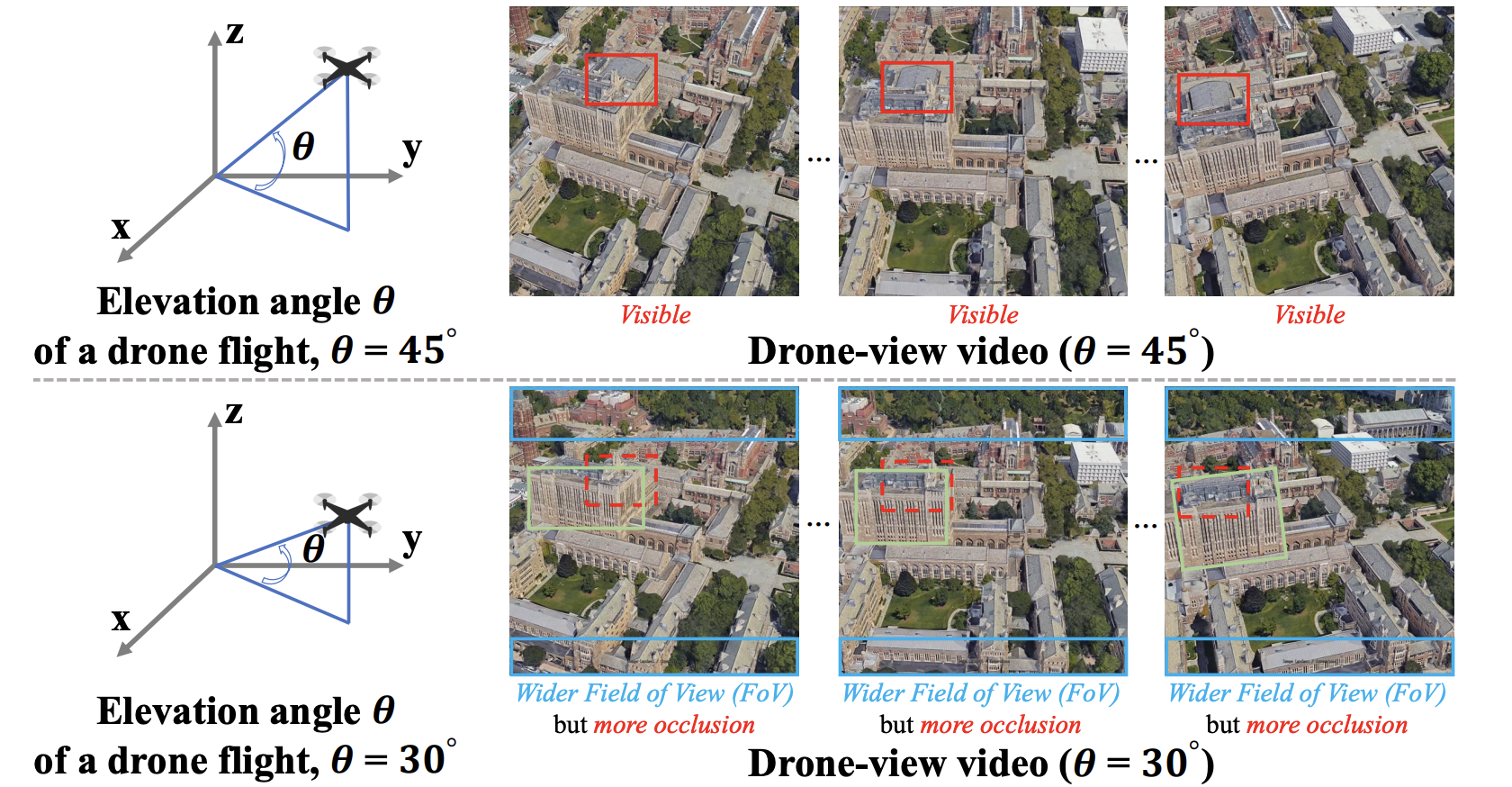
- First video-to-satellite geo-localization benchmark with real drone videos (not image-only!)
- Two challenging tasks:
→ Task 1: Video-based drone-view → satellite localization
→ Task 2: Satellite-guided drone video navigation - Zero university overlap between train/val/test → extremely challenging domain gap
- Full training/evaluation code + pretrained weights released
- Strong baseline using Video2BEV + Two-stage training
Paper: Video2BEV: Transforming Drone Videos to BEVs for Video-based Geo-localization (ICCV 2025)
-
(Optional) Release the 2-fps BEVs for both training and evaluation -
Release therequirements.txt -
Release the UniV dataset -
Release the weight of the second stage -
Release the evaluation code for the second stage -
Release the training code for the second stage -
Release the weight of the first stage -
Release the evaluation code for the first stage -
Release the training code for the first stage

The dataset split is as follows:
| Split for the each subset | #data | #buildings | #universities |
|---|---|---|---|
| Training | 701 vids + 12364 imgs | 701 | 33 |
| Query_drone | 701 vids | 701 | 39 |
| Query_satellite | 701 imgs | 701 | 39 |
| Query_ground | 2,579 imgs | 701 | 39 |
| Gallery_drone | 951 vids | 951 | 39 |
| Gallery_satellite | 951 imgs | 951 | 39 |
| Gallery_ground | 2,921 imgs | 793 | 39 |
More detailed file structure:
.
├── 30
│ ├── 10fps
│ │ ├── test
│ │ │ └── gallery_drone
│ │ └── train
│ │ └── drone
│ ├── 2fps
│ │ ├── test
│ │ │ └── gallery_drone
│ │ └── train
│ │ └── drone
│ └── 5fps
│ ├── test
│ │ └── gallery_drone
│ └── train
│ └── drone
├── 45
│ ├── 10fps
│ │ ├── test
│ │ │ └── gallery_drone
│ │ └── train
│ │ └── drone
│ ├── 2fps
│ │ ├── test
│ │ │ ├── gallery_drone
│ │ │ ├── gallery_satellite
│ │ │ └── gallery_street
│ │ └── train
│ │ ├── drone
│ │ ├── google
│ │ ├── satellite
│ │ └── street
│ └── 5fps
│ ├── test
│ │ └── gallery_drone
│ └── train
│ └── drone
├── dataset_split.json
└── organize_univ.pyWe note that there are no overlaps between 33 univeristies of training set and 39 univeristies of test set.
conda create --name video2bev python=3.7
# pip install torch==1.7.1+cu110 torchvision==0.8.2+cu110 -f https://download.pytorch.org/whl/torch_stable.html
pip install torch==1.13.1+cu116 torchvision==0.14.1+cu116 --extra-index-url https://download.pytorch.org/whl/cu116
pip install -r requirements.txt
# (optional but recommended) install apex
git clone https://github.com/NVIDIA/apex.git
cd apex
python setup.py install --cuda_ext --cpp_extIf you have any question of installing apex, please refer to issue-2 first, then search for possible solutions.
-
Download UniV.
-
cat and unzip the dataset:
cat UniV.tar.xz.* | tar -xvJf - --transform 's|.*/|UniV/|' -
[Optional] If you are interested in reproducing or evaluating the proposed Video2BEV, please feel free to contact us and ask for BEVs and synthetic negative samples (which is fine-tuned via diffusers).
-
[Optional] If you are interested in the proposed Video2BEV Transformation, please feel free to contact us and ask for SFM and 3DGS outputs.
- First-stage training:
- Check to
first-stagebranch bygit checkout first-stage - Refer to this file
- Check to
- First-stage evaluation:
- Check to
first-stagebranch bygit checkout first-stage - Refer to this file
- Check to
# Train:
# In the first stage, we fine-tune the encoder with the instance loss and contrastive loss.
sh train.sh
# Evaluation:
python test_collect_weights.py;
sh test.sh- Second-stage training:
- Check to
second-stage-trainingbranch bygit checkout second-stage-training - Refer to this file
- Check to
- Second-stage evaluation:
- Check to
second-stage-evalutionbranch bygit checkout second-stage-evalution - Refer to this file
- Check to
# Train:
# In the second stage, we freeze the encoder and train mlps with matching loss.
# please change contents in train.sh
sh train.sh
# Evaluation:
# please change contents in test_collect_weights.py and test.sh
python test_collect_weights.py;
sh test.sh.
├── first-stage
│ ├── 30-degree
│ │ └── model_xxxx_xxxx
│ │ └── two_view_long_share_d0.75_256_s1
│ │ └── model_xxxx_xxxx_xxx
│ │ ├── net_9301.pth
│ │ └── opts.yaml
│ └── 45-degree
│ └── model_2024-08-20-19_19_36
│ └── two_view_long_share_d0.75_256_s1
│ └── model_2024-08-20-19_19_36_059
│ ├── net_059.pth
│ └── opts.yaml
├── second-stage
│ ├── 30degree-2fps
│ │ └── model_2024-11-02-03-05-31.zip
│ ├── 45degree-2fps
│ │ └── model_2024-10-05-02_49_11.zip
│ └── 45degree-2fps-better
│ └── model_2024-10-20-06_02_09.zip
└── vit_small_p16_224-15ec54c9.pthChoose the weight and unzip it. Then put it in the root path in the working directory for your repo.
PS:
model_2024-11-02-03-05-31is the weight for 30-degree UniV (2fps) andmodel_2024-10-05-02_49_11is the weight for 45-degree UniV (2fps)- The evaluation number should be the same as our paper
- By tuning hyper-parameter, we can get a better result.
The following paper uses and reports the result of the baseline model. You may cite it in your paper.
@article{ju2024video2bev,
title={Video2bev: Transforming drone videos to bevs for video-based geo-localization},
author={Ju, Hao and Huang, Shaofei and Liu, Si and Zheng, Zhedong},
journal={arXiv preprint arXiv:2411.13610},
year={2024}
}Others:
@article{zheng2020university,
title={University-1652: A Multi-view Multi-source Benchmark for Drone-based Geo-localization},
author={Zheng, Zhedong and Wei, Yunchao and Yang, Yi},
journal={ACM Multimedia},
year={2020}
}
@article{zheng2017dual,
title={Dual-Path Convolutional Image-Text Embeddings with Instance Loss},
author={Zheng, Zhedong and Zheng, Liang and Garrett, Michael and Yang, Yi and Xu, Mingliang and Shen, Yi-Dong},
journal={ACM Transactions on Multimedia Computing, Communications, and Applications (TOMM)},
doi={10.1145/3383184},
volume={16},
number={2},
pages={1--23},
year={2020},
publisher={ACM New York, NY, USA}
}